Livox Mid-360 LiDAR分解レポート
これは3Dカメラ(ステレオ、Lidar, ToF含む) Advent Calendar 2024 8日目の記事です。

こんにちは、fastriver(@fastriver_org)です。
今回はとあるLiDARを分解する機会があったので、その分解レポートをお届けします。
ターゲットはLivox Mid-360です。
Livox Mid-360とは


Mid-360はドローンで有名なDJIの関連企業Livox Techが販売するLiDARの一つです。
安価ながら小型・軽量・広視野角・高解像度を実現しており、小型ロボットやドローンなどでよく採用されている印象があります。




他のLiDARとの比較を表に示します。
| Livox Mid-360 | Hesai XT32 | Velodyne VLP-16 | |
|---|---|---|---|
| 価格(販売時) | 9万円 | >100万円? | >70万円? |
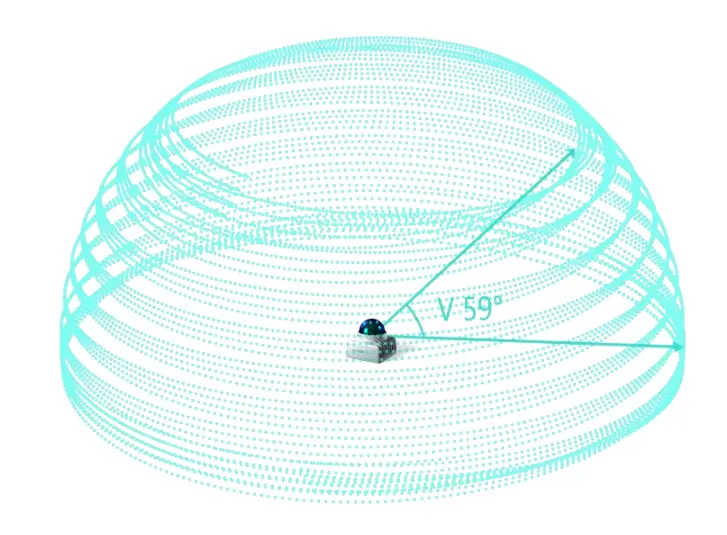
| FoV | 360°x59° | 360°x32° | 360°x16° |
| ライン数 | 40line相当 | 32line | 16line |
| 点群数 | 20万点/s | 64万点/s | 30万点/s |
| 大きさ | 65x65x60mm | 76x103x103mm | 72x103x103mm |
| 重さ | 265g | 970g | 830g |
| 測距可能距離 | 40m@10% | 80m@10% | ? |
| 最小測距距離 | 0.1m | 0.0m | 0.3m |
| 干渉回避機能 | あり | あり | なし |
表からもわかる通り、他の3D LiDARと比べても遜色ない性能を持ちながら圧倒的な価格の安さを実現しています(今でこそVLP-16の中古は安いですが)。
測距可能距離自体はあまり長くないので、車載向けとしては使えませんが、10km/h程度で動く自立走行ロボットなどなら十分な性能だと思います。
一方で解像度については、他のLiDARとの比較が難しい点があります。Mid-360のFoVはVLP-16の4倍近くあるのに、時間あたりの点群数は2/3で、純粋な点群密度は他と比べ低くなっています。
なのになぜ40line相当などと謳われているのか。これはLiDARのライン数表記が縦解像度のみを表現するものだからです。
Mid-360は後述のようにプリズムによる複雑なスキャンを実施しており、モータでレーザを回転させているLiDARとは点群の特性が異なります。
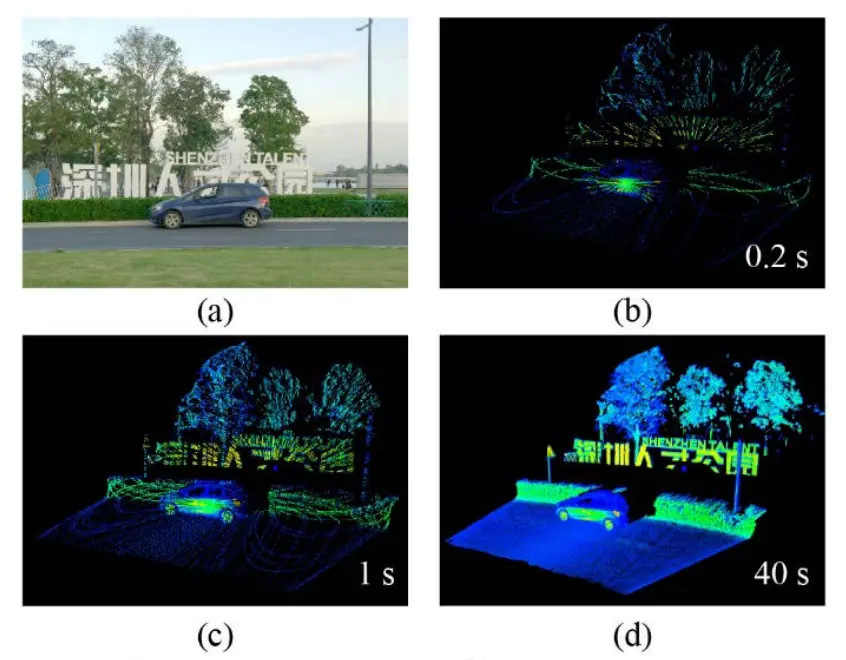
さらに通常のLiDARはフレームごとにほとんど同じ位置の点群を取得しますが、LivoxのLiDARは複数のプリズムの位置関係をフレームごとに若干変えることにより毎回異なる位置の点群を得ることができます。時間が経過する事に点群の密度が上がり、高解像度を実現できるようになっているのです。これはLivox LiDARのユニークな点です。
さて、Livoxの2020年の論文にはLivox Horizon/Mid-40/Tele-15の内部構造についての解説があるのですが、それより新しいMid-360の構造がどうなっているのかは未知です。2024年11月現在で分解している記事も見かけませんでした。ということでこれから分解していきましょう。
Mid-360を分解してみる
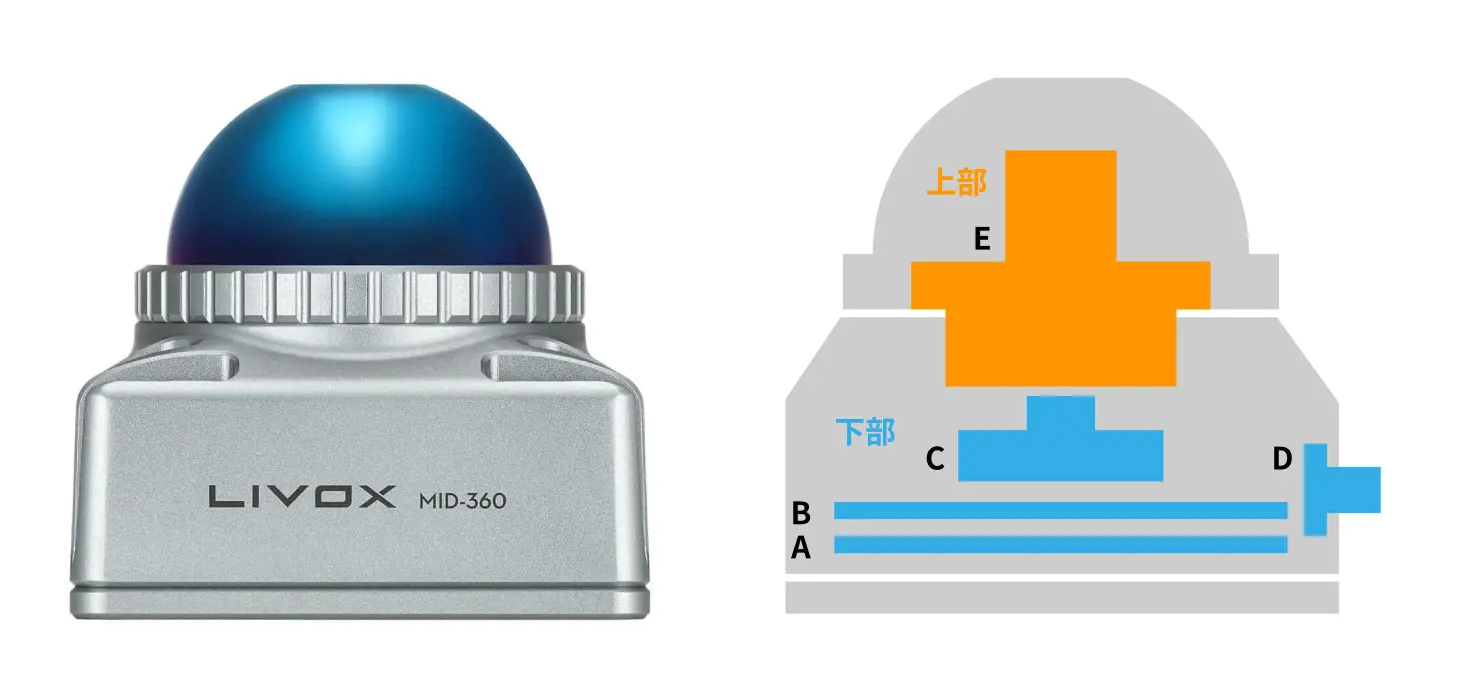
Mid-360の構造は上のように上部と下部に分かれており、下部は底の蓋から、上部はドーム側からアクセスすることができるようになっています。
下部の分解
まずは下部から分解していきます。
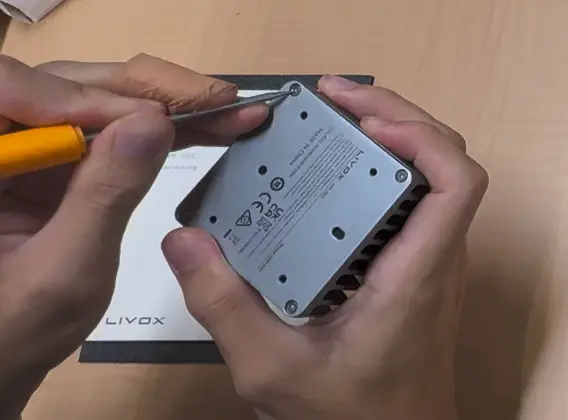
底は全体を覆うように蓋がついており、本体に四隅のネジで止められています。
ネジは普通のプラスネジですが、穴が透明な樹脂で埋められているのでキリかなにかで取ってからネジを外します。
蓋の内側には防水用のパッキンがついてお�り、中央には放熱用のシリコーンが塗られていました。
こういうのは開けた時点で防水じゃなくなるので注意!


コネクタは基板に面的についているタイプで、マイナスドライバーかピンセットで下からすくい上げればすぐに外れます。
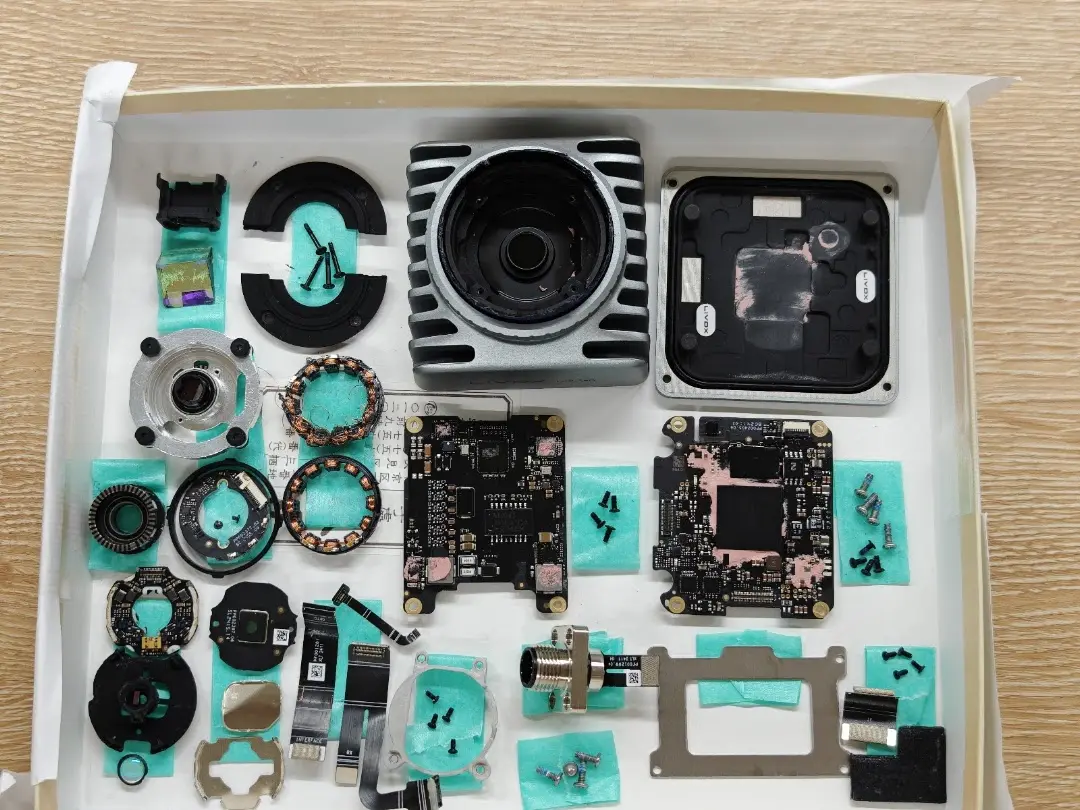
下から外していくと、A,B,C,Dのモジュールを取り外すことができます。
A 基板
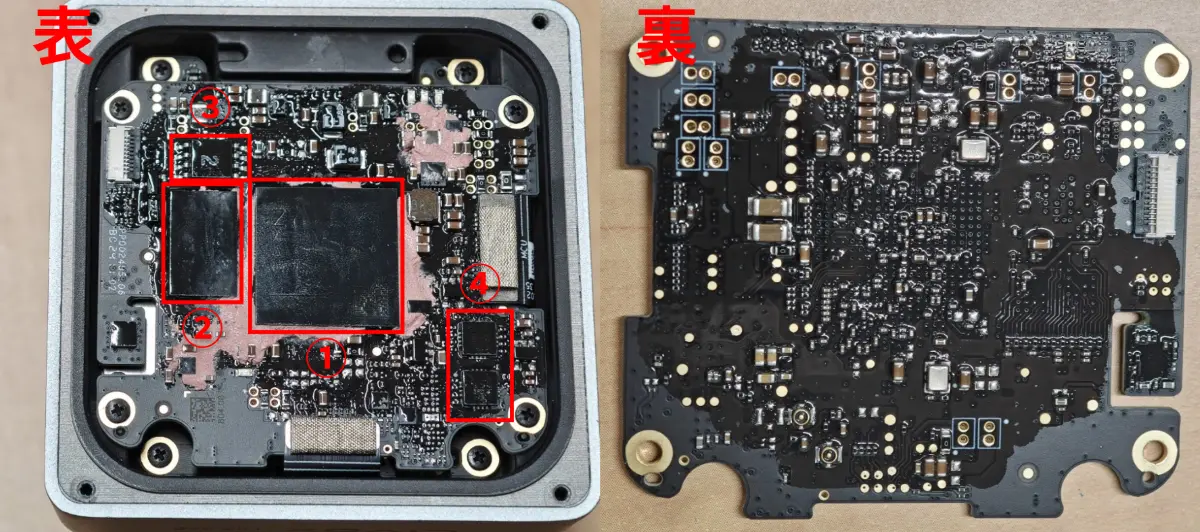
A基板はおそらく計算系のユニットです。放熱を考えてか一番外側のこの基板にFPGAが搭載されています。
- ① Xilinx製FPGA
- Zynq XC7Z020
- Artix-7 / Dual Arm Cortex-A9 / 866 MHz
- ② DRAM (1GB)
- Nanya NT5CC64M16GP-DIH
- DDR3 / Automotive Grade
- ③ メモリIC
- ④ DAC x2
- 3PEAK TPC112S8U
- 何に使ってるんだろうか
B 基板

B基板はA基板の内側に存在しています。役割はおそらくスキャン用のモータの制御などです。
- ① 磁気トランスデューサ
- MNC H1631CA
- モータへの電圧供給用?
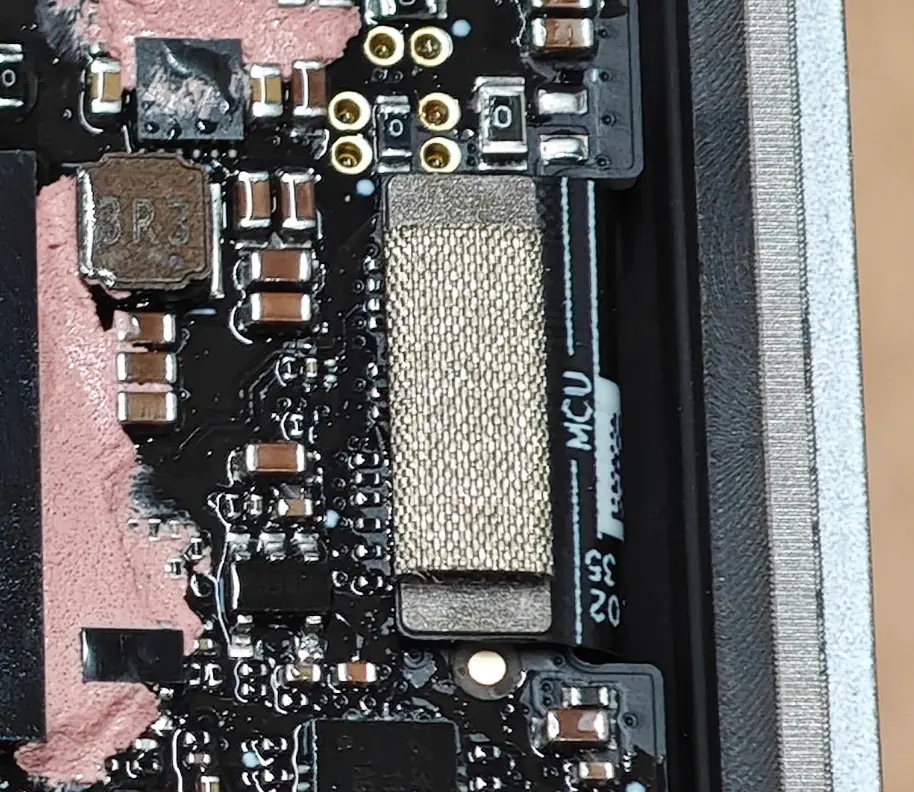
- ② MCU(Motor Control Unit)
- SPINTROL SPD1178
- ブラシレスモータ2台を制御可能
- スキャン用モータx2の制御か
C ToFユニット

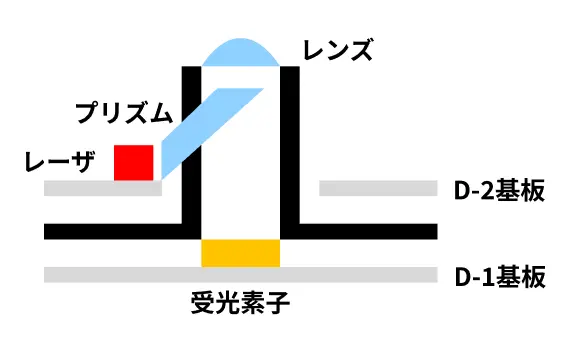
下部の一番奥にはToFユニットが存在しています。これは2つの基板と光学的構造で構成されています。
これらは接着剤で貼り付けられているため、ドライヤーなどで熱を加えることで外せます。
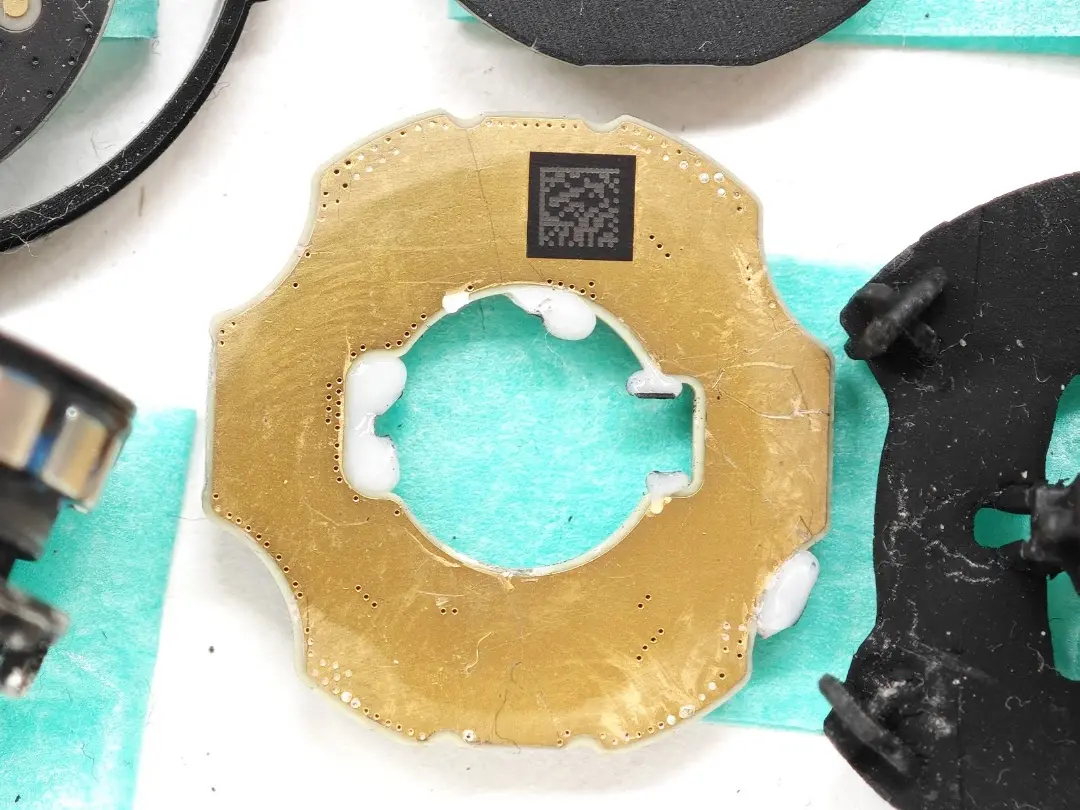
D-1基板の片面には受光素子が搭載されています。型番は不明です。
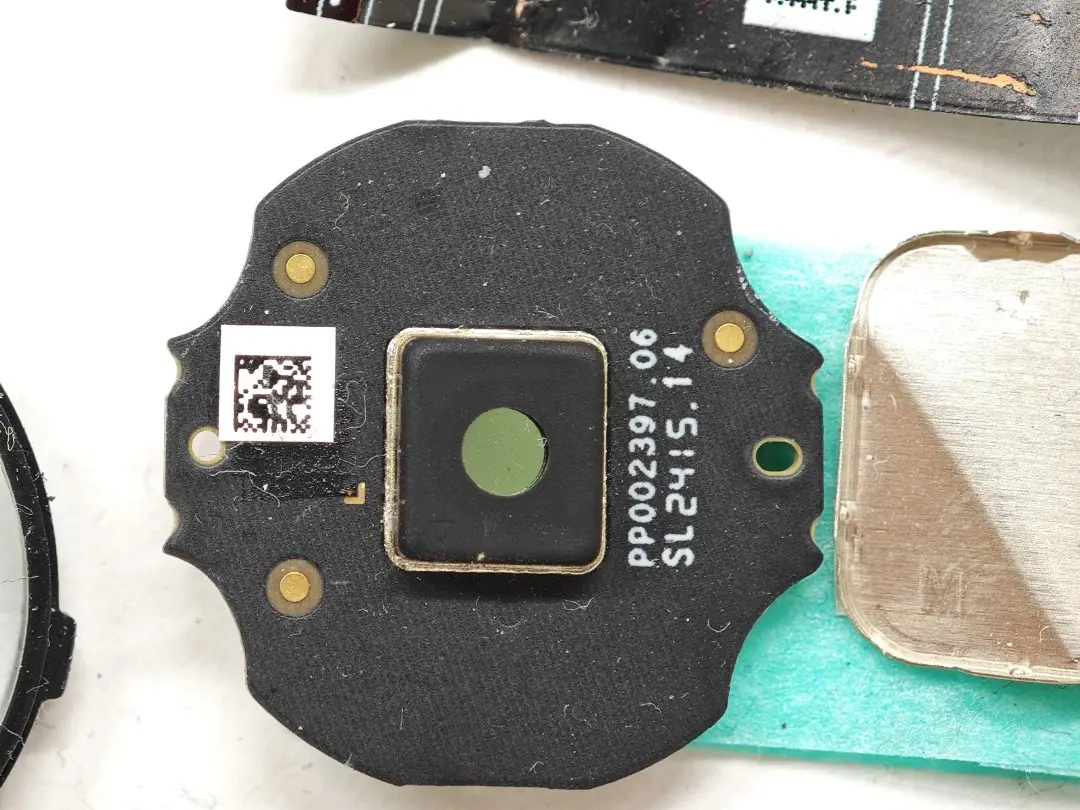
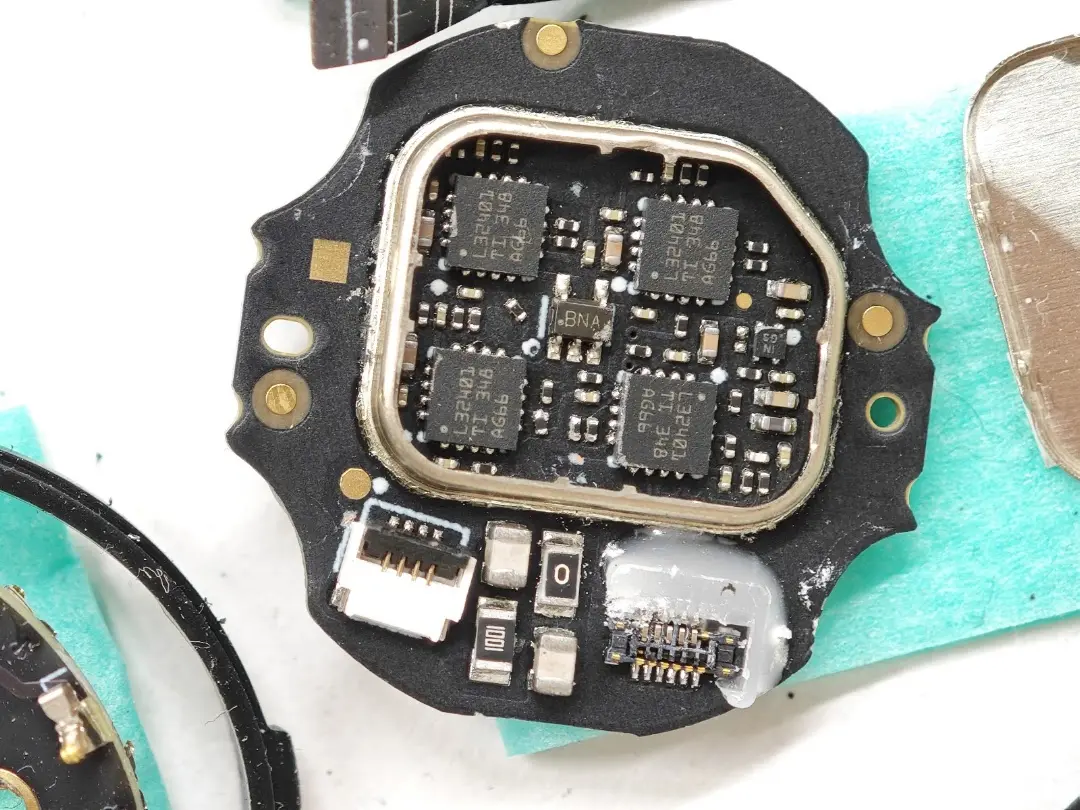
もう片面にはシールドで守られた4つの素子があります。これはトランスインピーダンス・アンプ(TIA)です。
受光素子として使われているであろうAPD(Avalanche Photodiode)の出力電流を電圧値に変換します。TI LMH32401が使われています。
TIAはAPDと1対1関係にあるので、受光素子も4つ搭載されていることがわかります。
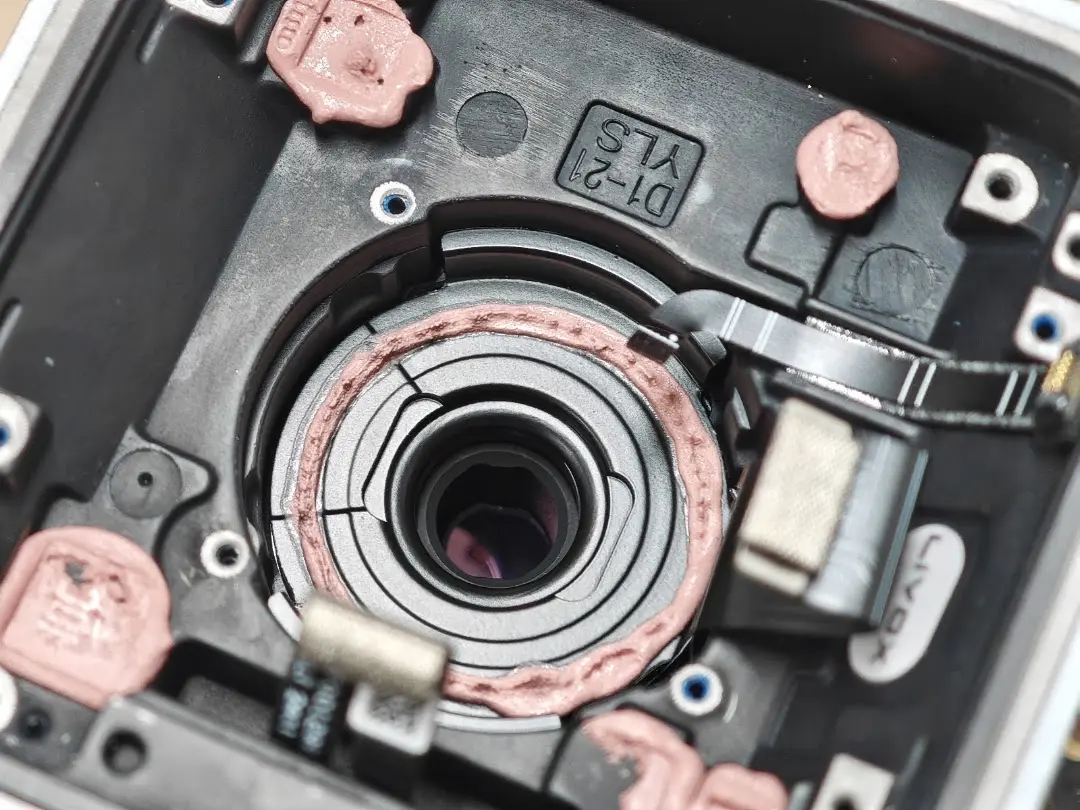
D-2基板にはレーザが実装されています。
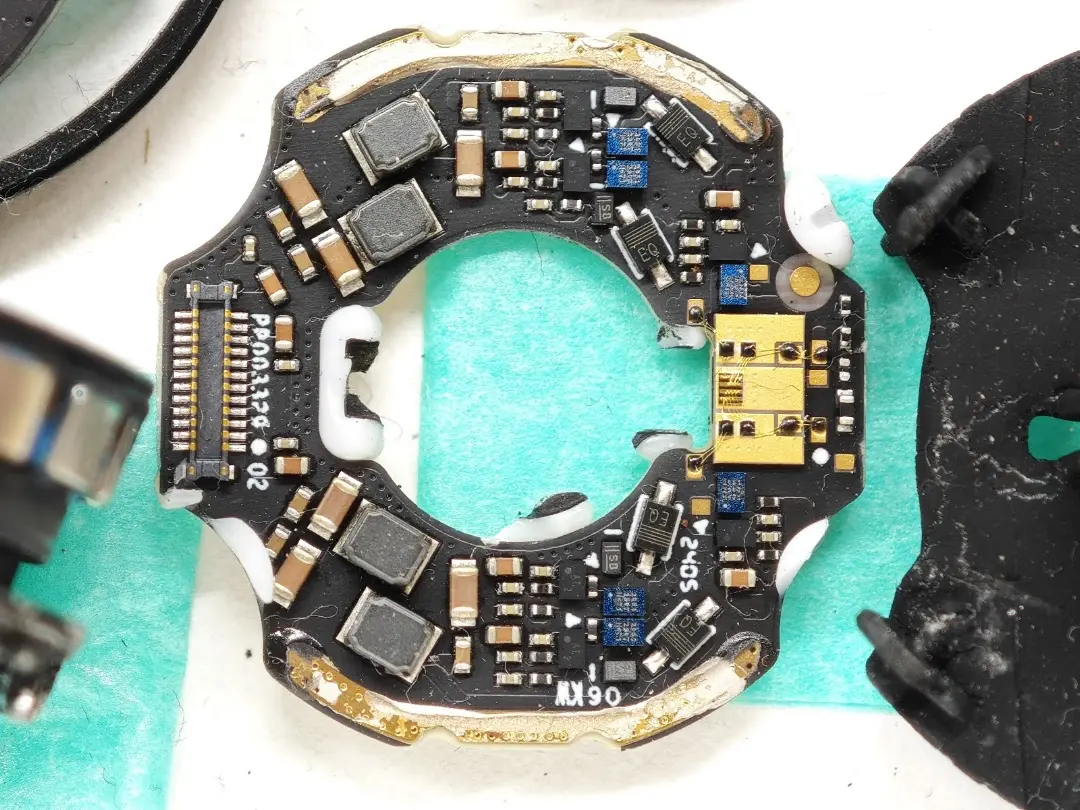
右側の小さな金色の部分がレーザです。中央が4つに分割されているため、4つレーザが並んでいることがわかります。このレーザは基板中央に向かって横向きに発射されます。
おそらく基板上青色の素子がレーザの電流を制御するGaNFET(EPC2051?)です。
中央の構造は中空になっており、先端にレンズ、内部にプリズムのようなものが存在します。

レンズは平凸レンズ、プリズムは横からつながっています。
このToFユニットの動作はLivoxの2020年の論文から類推することができます。
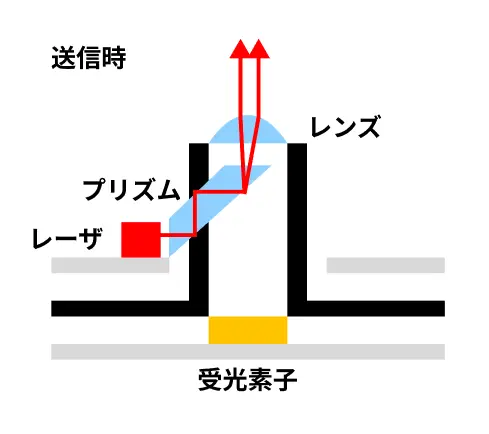
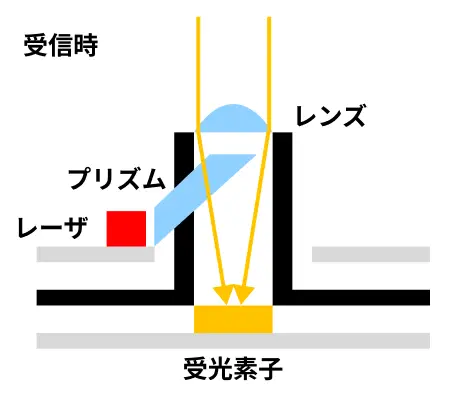
実は内部のプリズムはレーザの射出口と接続しています。発射されたレーザはプリズム内部を通って中央上方向に向きが変わり、レンズでコリメーションされて外界に飛び出していきます。
レーザが反射して返ってくると再びレンズから入射してきます。ここで気をつけておきたいのは、反射光は射出光よりもビーム径が大きいということです。レンズで受け取った光のほとんどはプリズムの横をすり抜け、底にある受光素子に到達します。
VLP-16のような多くのLiDARはレーザと受光素子を異なる位置に置き、異なるレンズで制御していたのですが、設置位置のキャリブレーションがかなりシビアでした。Mid-360はプリズムとレンズを組み合わせることでレーザと受光素子を同じ光軸上に置き、設置の手間を削減しています。
D コネクタ
Dのコネクタのネジ止めは外側4箇所のみですが、内部のコネクタがB基板とつながっているので外したい場合はA基板を外す必要があります。

これで下部の分解は終了です。
上部の分解
上部はまずドームを外すところから始まります。ドームの付け根部分に回せそうな部分があるのですが、まったく回りません。
うーん…
破壊します。




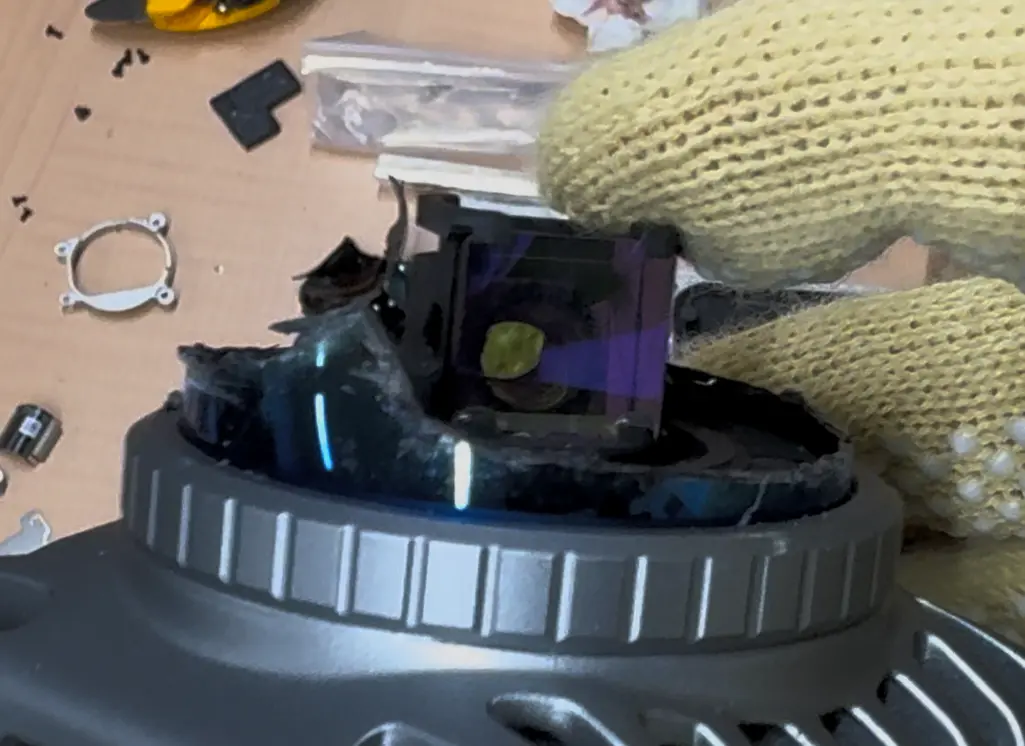
キリとマイナスドライバーとカッターで穴を開け、穴をニッパーで広げていくとドームを消すことができます。
プラスチックは圧力に弱いので引いて切るよりも鋭いものを押し付けたほうが切りやすいぞ!
真似する場合は手袋着用のこと
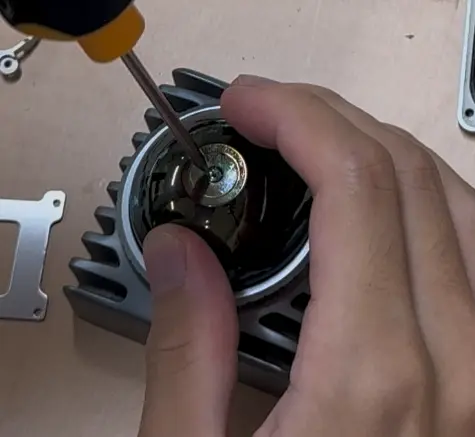
ドーム内部には回転する突起が出てきます。底の部分にネジがあるのでそれを外すと、底の黒い板が外れます。
モータっぽいコイルが見えます。このモジュールは引っ張ると外れます。
ドームだけ外して動かしてみると、以下のようになっています。
計算上は1秒間に184回転くらいしています。
E 回転モジュール
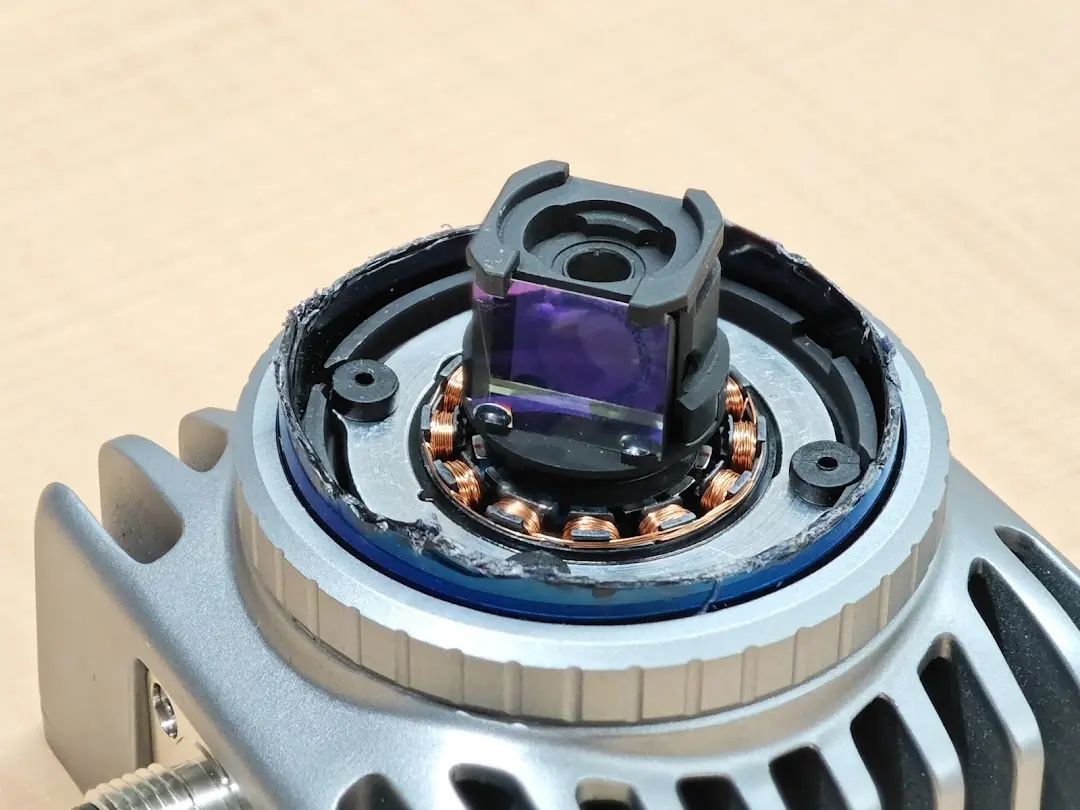
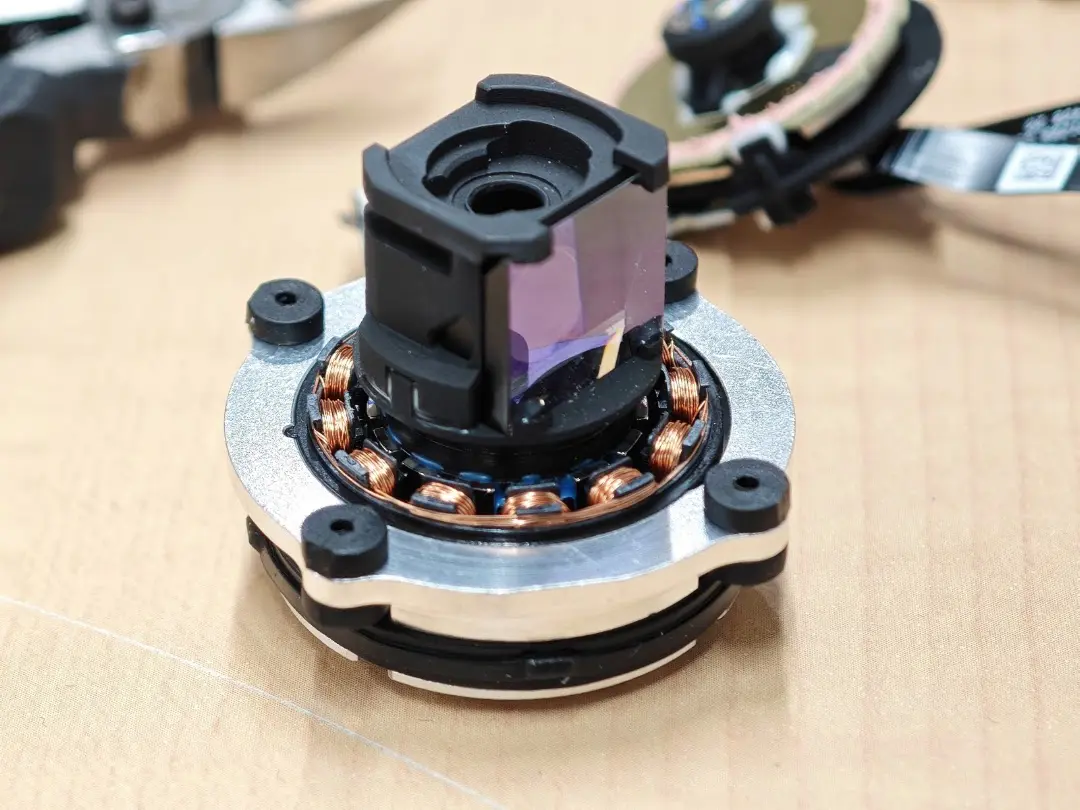
回転モジュールを分解していきます。突起部分は熱を加えることで外すことができます。

三角形のプリズムがついています。
下の部分にはコイルが2つ、それに向かい合うように磁石の回転部が存在しています。これはブラシレスモータです。表側のモータは突起部分の回転、裏側のモータは中心に嵌まっているプリズムの回転に使われているようです。
中央のプリズムはリスレープリズムと呼ばれるもので、底面は平ら、上面は斜めにカットされた形状になっています。
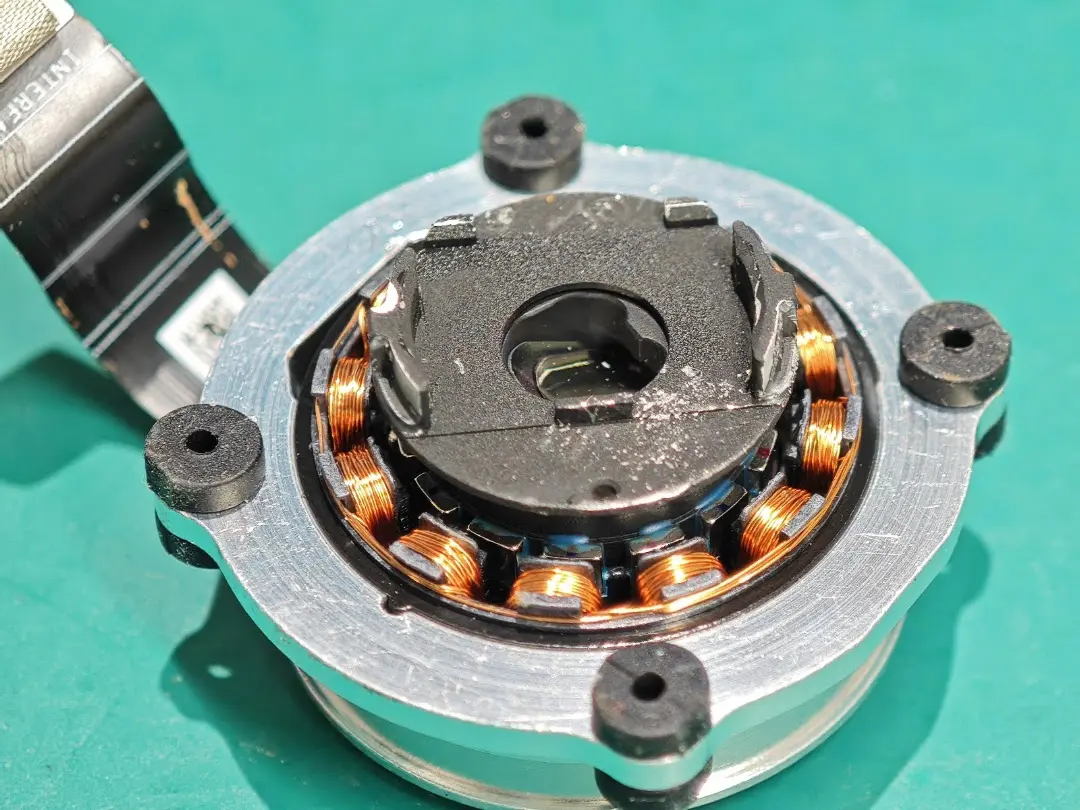
コイルを無理やり外すと内部から基板が出てきます。

これは光学エンコーダを2つ持っています。それぞれモータの回転数を光を使って測定しているようです。
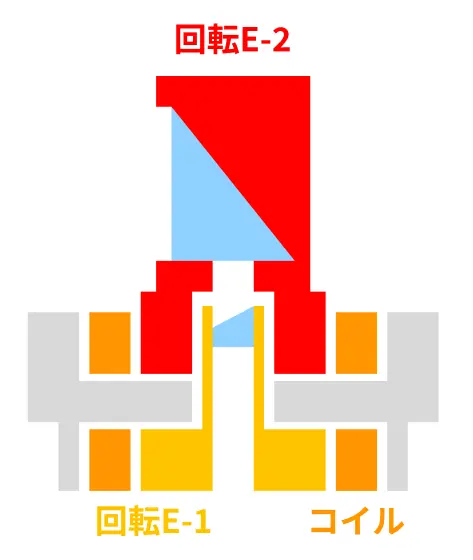
回転モジュールの全体像は上のようになっています。2つのモータを使って2つのプリズムを回転させています。測距光は中央下部から出入りし、このモジュールを通ることで時間ごとに異なる方向を測距できるようになっています。具体的なスキャンの仕組みはいずれ……
終わりに
Livox Mid-360は少ない部品でLiDARの機能を実現するために様々な工夫が施され、結果として小さく安価なデバイスが得られていることがわかりました。
実際にLiDARを使う上で内部の仕組みを知っている必要はほとんどないですが、知ることで少しだけ点群の気持ちに近づけるのではないのでしょうか。
おしまい
Share on X now! | Share on Facebook now! | Share on Linkedin now!